Como programar a Raspberry Pi Pico em Python
A Raspberry Pi Pico é uma placa de desenvolvimento composta pelo microcontrolador RP2040. Adequada para diversas aplicações, desde a criação de dispositivos simples até projetos mais complexos, a Raspberry Pi Pico combina hardware robusto, eficiência energética e flexibilidade de programação. A placa pode ser programada tanto em C/C++ quanto em Python.
Este tutorial tem como objetivo demonstrar como programar a Respbarry Pi Pico em Python através do interpretador MicroPython. O MicroPython é uma implementação de Python otimizada para rodar em microcontroladores e sistemas embarcados.
Para obter mais informações sobre características e especificações técnicas da placa, acesse o nosso post Conhecendo a Raspberry Pi Pico.
MATERIAIS NECESSÁRIOS
1x Raspberry Pi Pico RP2040
1x Cabo Micro USB
INSTALAR O MICROPYTHON NA RASPBERRY PI PICO
Para começar a programar a Raspberry Pi Pico, precisamos instalar o MicroPython. Para isso, baixe o arquivo MicroPython UF2 correto para a sua placa:
Em seguida, conecte a Raspberry Pi Pico ao seu computador, por meio de um cabo Micro USB, enquanto mantém pressionado o botão BOOTSEL, para ativar seu modo de programação.
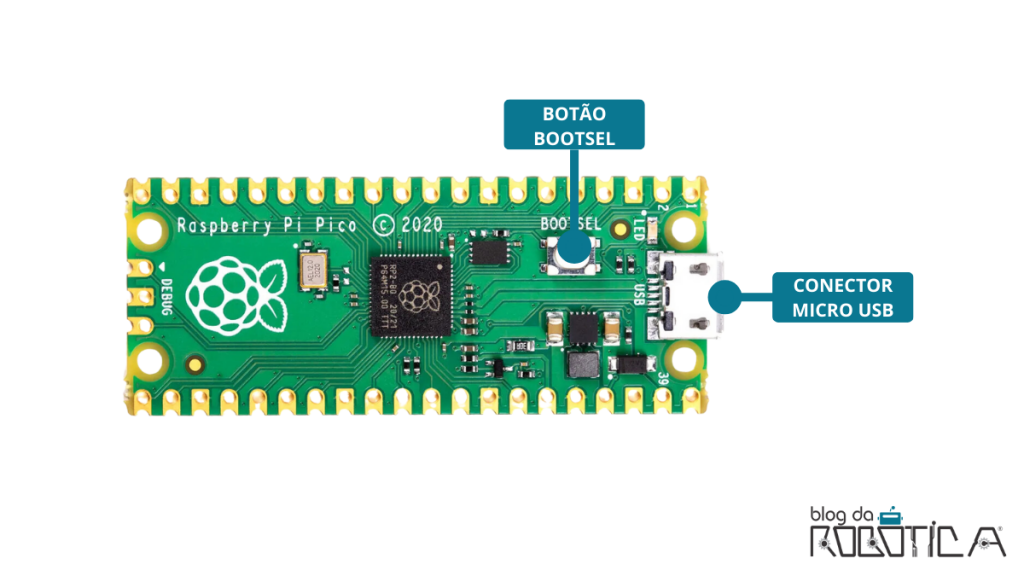
Solte o botão BOOTSEL e a Raspbarry Pi Pico será reconhecida pelo computador como uma unidade de armazenamento USB. Envie o arquivo baixado do tipo UF2 para esta unidade. A placa reiniciará e estará pronta para ser programada com MicroPython.

Observação: Esse processo só precisa ser realizado na primeira vez que for programar a Raspberry Pi Pico com MicroPython.
CONFIGURAÇÕES DO AMBIENTE DE DESENVOLVIMENTO
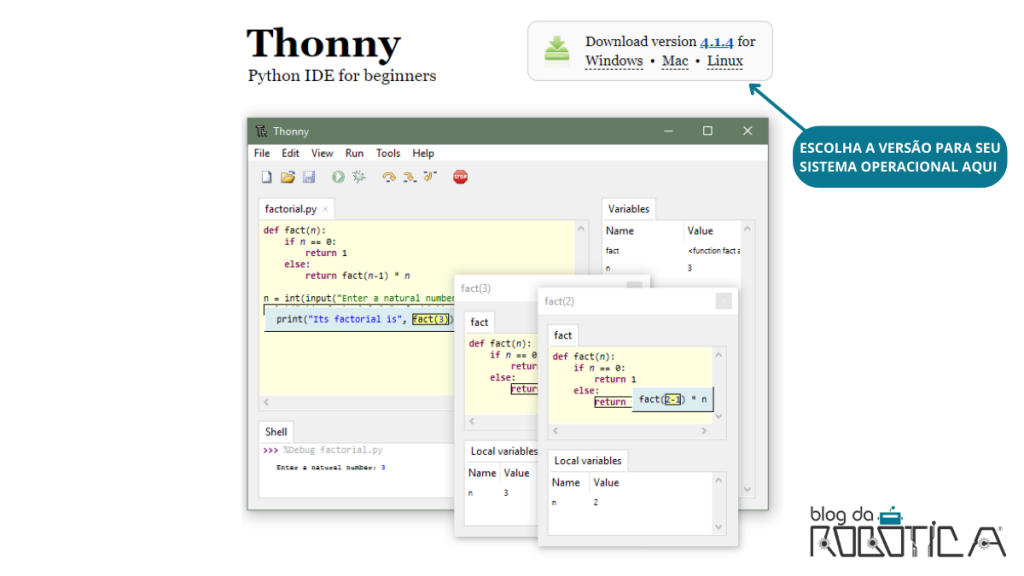
O ambiente de desenvolvimento que utilizaremos neste tutorial será o Thonny, software gratuito e de código aberto para Python projetado para iniciantes. Para baixá-lo acesse www.thonny.org/ e escolha a versão adequada para o seu sistema operacional.
Com o arquivo baixado, instale o Thonny em seu computador e, assim que a instalação for concluída, abra o programa. Para que a Raspberry Pi Pico seja programada precisamos alterar o interpretador que será usado para execução do código. Portanto, na barra de ferramentas do Thonny acesse Ferramentas > Opções.
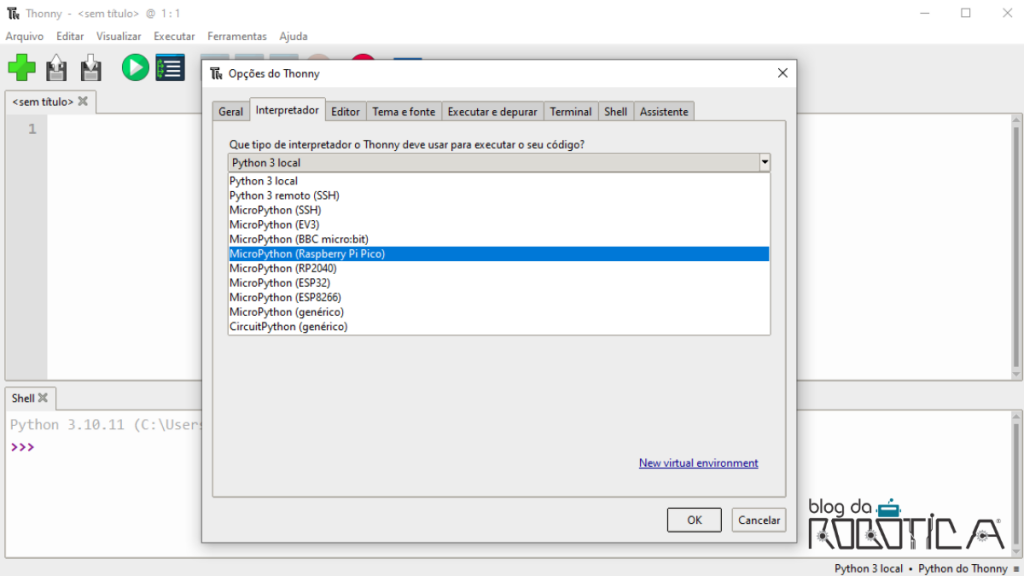
A janela de Opções será aberta, conforme a Figura 5. Abra a aba Interpretador e selecione MicroPython (Raspberry Pi Pico) como tipo de interpretador que o Thonny deve usar para executar o código. Em Porta, selecione a porta de comunicação em que a Raspberry Pi Pico foi reconhecida. Em nosso exemplo, a Raspberry Pi Pico foi reconhecida na porta COM8.
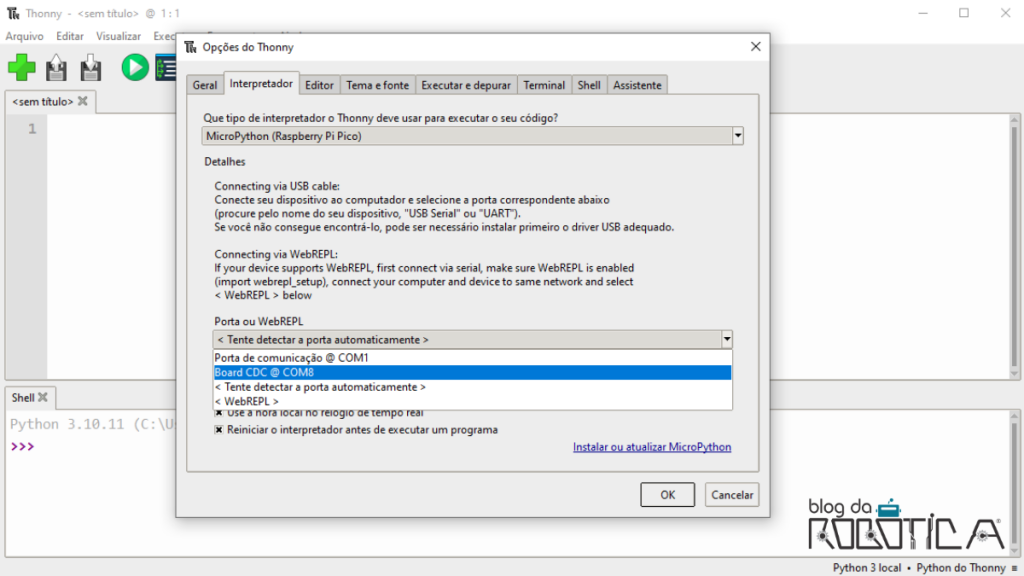
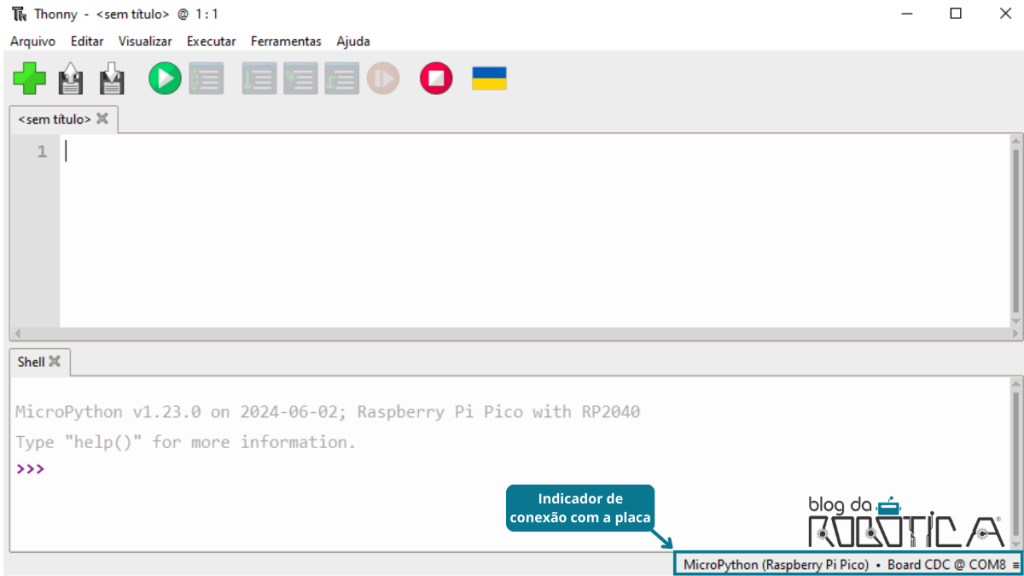
Certifique-se sobre a definição do interpretador e porta de comunicação no campo inferior direito da tela.
PROGRAMANDO A RASPBERRY PI PICO EM MICROPYTHON
O exemplo clássico para testar placas microcontroladoras é o Blink ou pisca LED, que consiste em acionar e desligar um LED por meio de um sinal digital. A placa Raspberry Pi Pico conta com um LED conectado ao GPIO 25, que pode ser utilizado neste teste. Desta forma, não há a necessidade de componentes adicionais.
Vamos entender a lógica de programação desse projeto a partir dos seguintes passos:
- Importar o módulo machine
Começamos o código importando o módulo “machine” por meio do comando “import machine”. Esse módulo contém funções e classes para interagir com o hardware, como manipulação de pinos de entrada e saída (GPIO), controle de PWM, ADC, entre outros.
- Importar o módulo utime
Depois, importamos módulo “utime” que fornece funções para manipulação de tempo, como pausas e contagens de tempo.
- Configurar o pino do LED
Em seguida, configuramos o pino 25 da Raspberry Pi Pico para ser uma saída digital por meio da instrução “led_pin = machine.Pin(25, machine.Pin.OUT)”
- Criar um loop infinito
Logo após, para criarmos um loop infinito usamos a instrução “while True”. Tudo dentro desse loop será repetido continuamente até que o programa seja interrompido.
- Controlar o LED
Dentro do loop “while true” inserimos as instruções responsáveis por fazer o LED piscar em intervalos de 0,5 segundos. A instrução “led_pin.value(1)” coloca o pino em que o LED está conectado em nível lógico alto (1). Adicionamos a pausa de 0,5 segundos com a instrução “utime.sleep(0.5)”. Em seguida, desligamos o LED com a instrução “led_pin.value(0)” e inserimos um intervalo de 0,5 segundo com o comando “utime.sleep(0.5)” novamente.
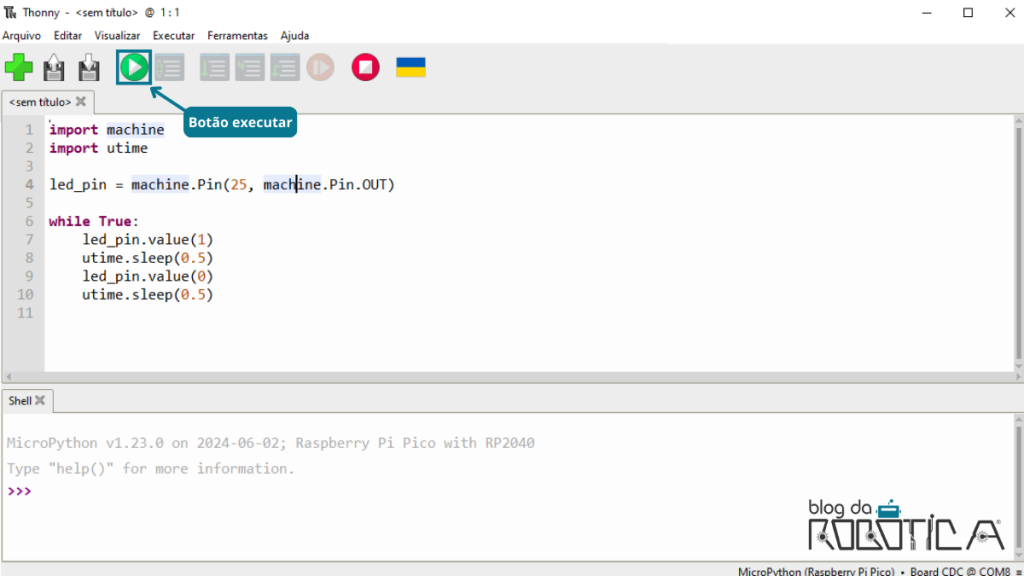
No final, o código ficará assim:
import machine
import utime
led_pin = machine.Pin(25, machine.Pin.OUT)
while True:
led_pin.value(1)
utime.sleep(0.5)
led_pin.value(0)
utime.sleep(0.5)
Agora é só clicar em Executar para enviar o código para placa.
O LED deve piscar em intervalos de 0,5 segundos, como mostrado no vídeo:
Obrigado por escolher nosso blog, espero ter ajudado.
Qualquer dúvida deixe uma mensagem nos comentários abaixo!
Graduado em Engenharia da Computação pela Faculdade Independente do Nordeste.
Bacharel em Engenharia Elétrica com ênfase em Eletrônica, mestra em Engenharia Industrial e especialista em Docência com ênfase em Educação Inclusiva. Atua no setor de Desenvolvimento de Produtos na Casa da Robótica. Editora chefe e articulista no Blog da Robótica. Fanática por livros, Star Wars e projetos Maker.