Como utilizar o módulo sensor de cor TCS3200 / TCS230 com Arduino
O módulo sensor de cor TCS3200 / TCS230 é capaz de detectar cores do tipo RGB (do inglês Red, Green e Blue, que significa Vermelho, Verde e Azul) de objetos à sua frente.

No centro do módulo sensor de cor TCS3200 / TCS230 há um chip sensor RGB TCS3200 / TCS230 que é o responsável pela detecção das cores. Esse pequeno chip é formado por 64 fotodiodos (em um arranjo 8 x 8), conforme pode ser observado na Figura 2. Vale lembrar que o fotodiodo é um dispositivo semicondutor que converte luz em corrente elétrica.
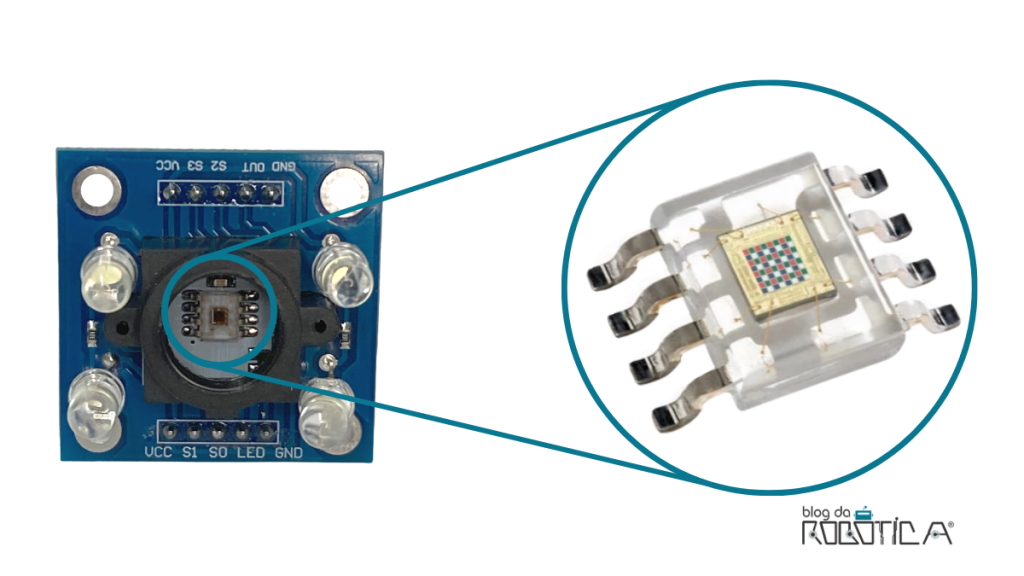
Os 64 pequenos fotodiodos possuem 4 diferentes filtros: 16 sensores têm filtro de identificação da cor verde, 16 da cor vermelha, 16 da cor azul e 16 que não possuem filtro, ou seja, detectarão toda a luminosidade. Com essa funcionalidade, é possível medir o nível de luminosidade de qualquer objeto e definir sua cor.
Os fotodiodos com filtro comum são conectados em paralelo e por meio dos pinos de controle podemos escolher qual dos filtros queremos ler. Por exemplo, se desejamos detectar a cor verde, precisamos selecionar a leitura dos 16 fotodiodos com filtro verde. Fazemos isso, configurando os pinos S2 e S3 como nível lógico ALTO. A Tabela 1 detalha o modo de configuração dos pinos S2 e S3 para os demais filtros dos fotodiodos.
| S2 | S3 | Filtros do Fotodiodo |
| Baixo | Baixo | Vermelho |
| Baixo | Alto | Azul |
| Alto | Baixo | Claro (sem filtro) |
| Alto | Alto | Verde |
Após a detecção, usando um conversor de corrente para frequência, as leituras dos fotodiodos são convertidas ondas quadradas com frequência diretamente proporcional à intensidade da luz. Usando um microcontrolador podemos ler estas ondas e obter os resultados para a cor.
A faixa de frequência de saída é de 2HZ ~500KHZ. O módulo sensor de cor TCS3200 / TCS230 possui dois pinos (S0 e S1) para controle da frequência de saída. A frequência pode ser dimensionada para três valores predefinidos diferentes de 2%, 20% ou 100%, conforme a Tabela 2.
| S0 | S1 | Escala de fraquência |
| Baixo | Baixo | Desligar |
| Baixo | Alto | 2% |
| Alto | Baixo | 20% |
| Alto | Alto | 100% |
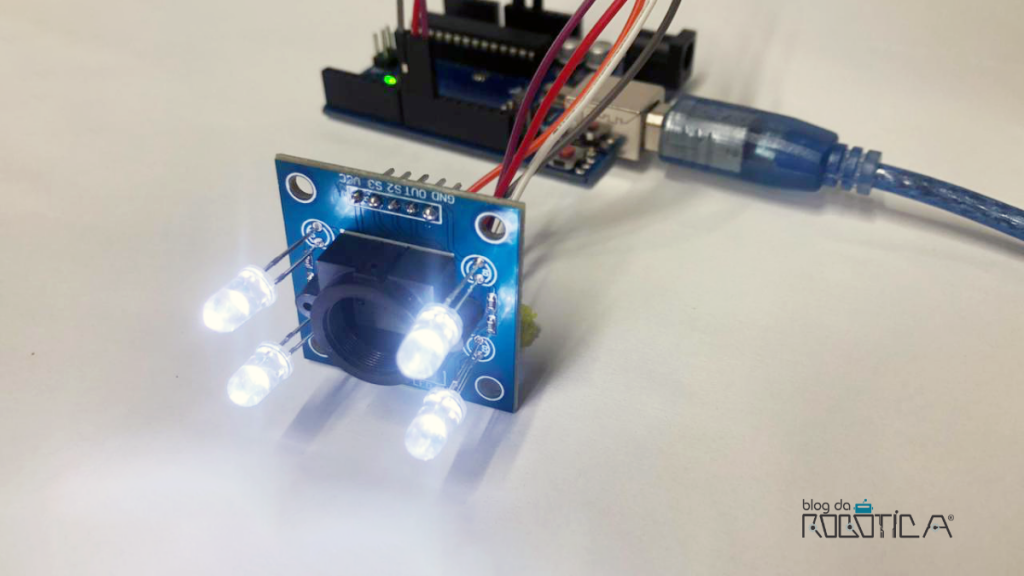
Para auxiliar a detecção das cores, o sensor conta com 4 LEDs brancos em volta do sensor, conforme a Figura 3. Os LEDs são acionados quando o módulo é ligado e são usados para iluminar o objeto que terá sua cor detectada.
Quanto a pinagem, temos a configuração da Figura 4.
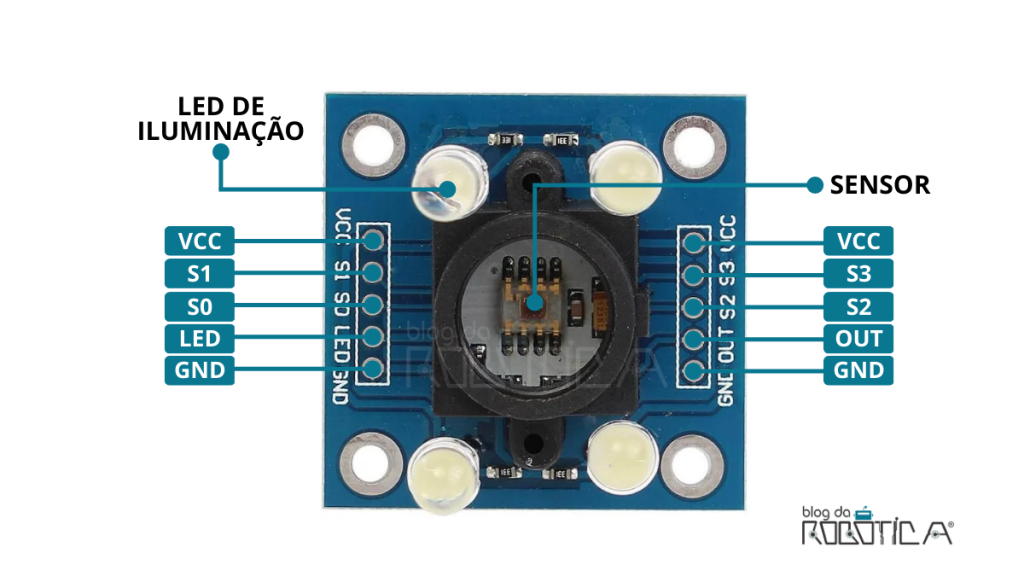
Cada pino possui uma função específica:
- GND: Pino de aterramento;
- VCC: Pino de alimentação do módulo. Essa alimentação pode variar entre 2,7V e 5,5 V;
- S0 e S1: Pinos de configuração da escala de frequência saída;
- S2 e S3: Pinos de configuração dos filtros dos fotodiodos;
- OUT: Pino de saída de sinal.
Agora que já conhecemos o módulo sensor de cor TCS3200 / TCS230, vamos utilizá-lo. A proposta deste tutorial é utilizar o módulo em conjunto com o Arduino para identificar as cores vermelha, verde, azul e branca.
MATERIAIS NECESSÁRIOS
- 1 x Placa Uno SMD R3 ATmega328;
- 1 x Cabo USB compatível com Arduino;
- 1x Módulo Sensor de Cor TCS3200;
- Jumpers Macho-Fêmea.
ESQUEMÁTICO DE LIGAÇÃO:
Inicialmente, certifique-se que sua placa UNO esteja desligada. Em seguida monte o circuito da Figura 5, utilizando o Arduino e o módulo TCS3200.
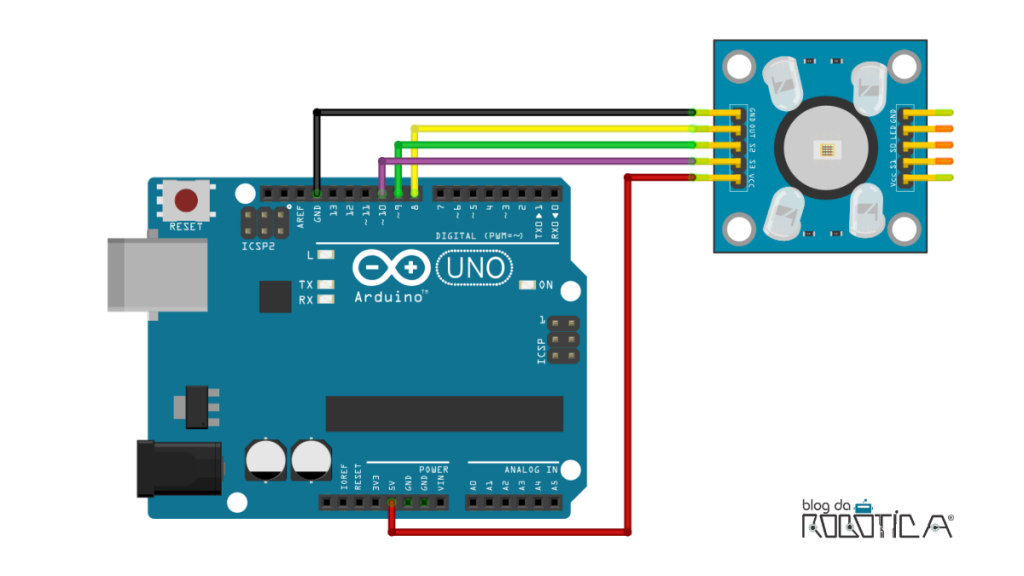
Ao montar o circuito observe os seguintes pontos:
- O módulo pode ser alimentado com 5V ou 3,3V do Arduino;
- O pino GND do módulo deve ser conectado ao GND do Arduino;
- O pino OUT do módulo deve ser conectado ao pino digital 8;
- O pino S2 do módulo deve ser conectado à porta digital 9;
- O pino S3 dever ser ligado ao pino digital 10 do Arduino.
ELABORANDO CÓDIGO
Nesse projeto, vamos realizar a leitura do módulo sensor de cor TCS3200 / TCS230 para identificação das cores vermelha, verde, azul e branca. O resultado será exibido no monitor serial.
Para facilitar o entendimento do código, acompanhe os seguintes passos:
1.Definir as constantes correspondentes aos pinos do Arduino
Iniciamos o programa definindo as constantes que serão utilizadas no código. Cada constante corresponde a um dos pinos do Arduino conectados aos pinos do sensor.
No nosso código foram declarados os pinos: PinOUT, PinS2 e PinS3.
2.Declaração das variáveis que serão utilizadas no código
Foram declaradas as variáveis red, green e blue para armazenar dados de leitura dos fotodiodos com filtro vermelho, verde e azul, respectivamente.
3.Inicialização da função cores()
4.Configuração dos pinos de entrada e saída e inicialização da comunicação serial
No setup() definimos os pinos de configuração dos filtros dos fotodiodos (S2 e S3) como saída e o pino OUT como entrada.
Além disto, inicializamos a comunicação serial por meio da instrução Serial.begin(9600);
5.Leitura dos fotodiodos
Na função loop() definimos o modo de configuração dos pinos S2 e S3 para os filtros dos fotodiodos e realizamos a leitura do pino OUT do módulo sensor de cor TCS3200 / TCS230.
Iniciamos configurando os pinos S2 e S3 como nível lógico baixo (LOW) para ativar a leitura dos fotodiodos com filtro vermelho. Em seguida, usamos a função pulseIn() para captar a largura do pulso do pino OUT do módulo sensor de cor, a armazenamos na variável red e imprimimos no monitor serial.
Repetimos a mesma lógica para configuração dos pinos S2 e S3 e realização da leitura para os filtros dos fotodiodos verde e azul.
Ao final, chamamos a função cores().
6.Função cores()
A função cores() será responsável por comparar os valores de leitura do sensor de cor e retornar qual a cor detectada.
Com base nesses passos, o código será escrito da seguinte forma:
/* - DETECÇÃO DE CORES UTILIZANDO MÓDULO SENSOR DE CORES TCS3200 - ================================================= === BLOG DA ROBOTICA - www.blogdarobotica.com === ================================================= Autor: Jonas Souza E-mail: [email protected] Facebook: facebook.com/blogdarobotica Instagram:@blogdarobotica YouTube: youtube.com/user/blogdarobotica ================================================= === CASA DA ROBOTICA - www.casadarobotica.com === ================================================= Facebook: facebook.com/casadaroboticaoficial Instagram:@casadarobotica ================================================== */ #define PinOUT 8 //Definição do Pino OUT na entrada digital 8 #define PinS2 9 //Definição do Pino S2 na entrada digital 9 #define PinS3 10 //Definição do Pinto S3 na entrada digital 10 int red;//Declaração da variável que representará a cor vermelha int green; //Declaração da variável que representará a cor verde int blue; // Declaração da variável que representará a cor azul void cores(); //Inicialização da função void setup() { pinMode(PinOUT, INPUT); //Definição do PinOUT como sendo um pino de entrada pinMode(PinS2, OUTPUT); //Definição do Pino S2 como sendo um pino de saída pinMode(PinS3, OUTPUT); //Definição do Pino S3 como sendo um pino de saída Serial.begin(9600); //Inicia o monitor Serial com velocidade de 9600 } void loop() { digitalWrite(PinS2, LOW); // Aciona um valor LOW ao Pino S2 digitalWrite(PinS3, LOW); // Aciona um valor LOW ao Pino S3 red = pulseIn(PinOUT, LOW); // define red como sendo responsável por ler a informação de pulso LOW do pino out Serial.print(" R: "); // Mostra a letra R no monitor Serial, representando red Serial.print(red); // Mostra o valor lido no PulseIn delay(15); // delay de 15 milissegundos até o próximo comando digitalWrite(PinS2, HIGH); // Aciona um valo high ao Pino S2 digitalWrite(PinS3, HIGH); // Aciona um valo high ao Pino S3 green = pulseIn(PinOUT, LOW); // define green como sendo responsável por ler a informação de pulso low no pino out Serial.print(" G: "); // Mostra a letra R no monitor Serial, representando green Serial.print(green); // Mostra o valor lido no PulseIn delay(15); // delay de 15 milissegundos até o próximo comando digitalWrite(PinS2, LOW);// Aciona um valor loq ao Pino S2 digitalWrite(PinS3, HIGH); // Aciona um valor high ao Pino S3 blue = pulseIn(PinOUT, LOW);// define blue como sendo responsável por ler a informação de pulso low no pino out Serial.print(" B: "); // Mostra a letra B no monitor Serial, representando blue Serial.println(blue); // Mostra o valor lido no PulseIn delay(15); // delay de 15 milissegundos até o próximo comando cores(); //chamada da função cores() delay(1000); } void cores() { //funçao responsavel por definir a cor que o sensor de luminosidade está lendo if ( blue < 20 && red < 20 && green < 20) { //detecção da cor branca Serial.println("Branco"); } else if (blue < red && blue < green) { //detecção da cor azul Serial.println("Azul"); } else if (green < red && green < blue) { //detecção da cor verde Serial.println("Verde"); } else if (red < blue && red < green && red < 100) { //detecção da cor vermelha Serial.println("Vermelho"); } }
Por fim, temos o funcionamento do projeto, mostrado no Vídeo 1.
Espero ter ajudado,
Obrigado a todos e em caso de dúvidas deixe seu comentário abaixo!
Att. Jonas Souza
Graduando em Engenharia Elétrica.